- 2018-12-21
- 土木施工単価
1. はじめに
日本では,高度経済成長期に橋梁やトンネルなどの社会インフラが多く建設されました。建設後50年以上が経つこれらの施設は老朽化が進み,崩壊などの大きな事故が心配されています。また,劣化や損傷などにより,維持管理・更新のための費用の増加が懸念されていますが,一方で,熟練技術者は減ってきています。このような状況の中で,事故を未然に防ぎ,低コストでの維持を実現するためにロボット技術が期待されています。ロボット技術を活用することにより,維持管理作業のシステム化や,作業員の立ち入りが困難な箇所の点検が安全に行えるようになるなどのさらなる効果も期待できます。
また,ロボットは災害現場での活躍も見込まれています。日本では地理的に地震・火山噴火などの自然災害が多く発生します。災害調査ロボットにより被災状況を素早く把握することや,災害復旧ロボットにより遠隔地から安全に工事を行うことが期待されています。
ここでは,これらの社会課題を解決するために研究開発を行ったロボットについて,事例を交えて紹介します。
2. NEDOにおけるロボット分野の取り組み
新エネルギー・産業技術総合開発機構(NEDO)は,「エネルギー・地球環境問題の解決」および「産業技術力の強化」の2つのミッションに取り組む公的研究開発マネジメント機関です。ロボット分野では,少子高齢化により労働力人口が減ることや,作業負荷が増えることなどの社会的課題に対応するための研究開発を進めています。たとえば,インフラの維持管理,災害調査,サービス,ものづくりなどのさまざまな場面で活用できるロボットを開発しています。インフラの維持管理と災害対応の分野では,次に紹介する2つのプロジェクトを実施しています。これらのプロジェクトにおいて,前述の課題に対応するための技術を開発し,また開発した技術が社会で広く使われるための活動を行っています。
ものづくりなどのさまざまな場面で活用できるロボットを開発しています。インフラの維持管理と災害対応の分野では,次に紹介する2つのプロジェクトを実施しています。これらのプロジェクトにおいて,前述の課題に対応するための技術を開発し,また開発した技術が社会で広く使われるための活動を行っています。
2-1 インフラ維持管理・更新等の社会課題対応システム開発プロジェクト(事業期間:2014~2018年度)
「インフラ状態モニタリング用センサシステム開発」,「イメージング技術を用いたインフラ状態モニタリングシステム開発」,「インフラ維持管理用ロボット技術・非破壊検査装置開発」の3つの研究開発項目からなる5年間のプロジェクトを進めています。このプロジェクトでは,できるだけ早く現場で役に立つ実用的なシステムを開発することを目指しています。このため,関係省庁とも連携し,また自治体や点検コンサルタントなどの想定されるユーザに使ってもらうための成果普及活動を積極的に進めています。なお,ロボット領域については,2017年度までの4年間の研究開発期間で,この間に,橋梁・水中の維持管理用と災害調査用として,最終的に11種類のロボットシステムを開発しました。
2-1 SIPインフラ維持管理・更新・マネジメント技術(事業期間:2014~ 2018年度)
内閣府に設置される「重要政策に関する会議」の1つである総合科学技術・イノベーション会議が主導する戦略的イノベーション創造プログラム(SIP)の一課題として実施されている「インフラ維持管理・更新・マネジメント技術」において,NEDOは国土交通省および国立研究開発法人科学技術振興機構とともに管理法人を担っています。このプロジェクトでは,予防保全によるインフラ事故の未然防止とライフサイクルコストの最小化を目指して,①点検・モニタリング・診断技術,②構造材料・劣化機構・補修・補強技術,③情報・通信技術,④ロボット技術,⑤アセットマネジメント技術の5つの研究開発を推進し,NEDOは①~④の研究分野を担っています。本プロジェクトでは,産官学が一体となった実施体制の強みを活かし,開発目標の設定から現場実証,普及加速支援までを俯瞰(ふかん)した一連の取り組みを行っています。
3. プロジェクトの具体的な事例
3.1 橋梁点検用ロボットシステム
人の立ち入りが困難な場所にある橋梁の橋脚や橋桁,床版の点検を行うため,飛行型,懸架型,吸着型等の多彩な点検ロボットを開発しました。橋梁点検においては,1つの点検ロボットで全て点検できることは稀(まれ)であり,橋梁の構造や設置されている地理環境などを総合的に勘案し,複数のロボットを組み合わせて活用することが,安全かつ効率的な点検に繋がります。
図-1は,2.1のプロジェクトで開発された橋梁点検ロボットです。床版やコンクリート面の撮影を主な目的としたロボットであり,2017年度と2018年度には全国各地の橋梁において,実証実験を行い,実用化を進めています。これにより,コンクリートのひび割れや鋼部材の腐食等の効率的な点検や,客観的な検査データの取得が可能となり,検査帳票の作成など一部業務の効率化を図ることができるようになりました。

【図-1 2.1のプロジェクトで開発している橋梁点検用ロボット】
表-1は,これらのロボットの主な特徴をまとめたものです。
【表-1 2.1のプロジェクトで開発している橋梁点検ロボットの特徴】
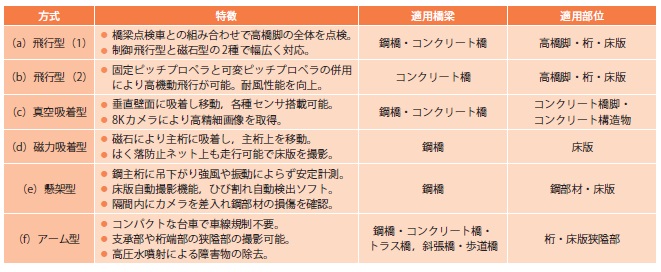
図-2は2.2のプロジェクトで開発された橋梁点検ロボットです。近接画像の取得に加え,一部のロボットは打音検査を行えます。表-2は,これら橋梁点検ロボットの特徴をまとめたものです。

【図-2 2.2のプロジェクトで開発している橋梁点検ロボット】
これらの技術により,アクセスの難しい箇所まで接近・接触移動し,カメラを用いた近接目視によるインフラ構造物の点検や,打音検査を行うことが可能になります。開発された技術については,現場への試験導入を通して,維持管理の効率性・安全性の向上のための改良・改善を進めています。
3.2 トンネル点検用ロボットシステム
トンネルの点検においては,トンネル内の車線規制など行い,点検を実施します。交通量が一定以上ある場合は,近隣住民の生活への影響や経済活動への影響などが発生するため,夜間等に点検を実施することもあります。
図-3に示す点検ロボットシステムは,システムの設置・撤去時のみ一時的な全面規制を行い,トンネル点検時には歩道規制だけで近接目視画像の取得,および打音検査を同時に行います。

【図-3 トンネル点検ロボットシステム※2 東急建設】
また,点検用のフレームを変形させて障害物を回避する構造となっており,2車線のトンネルの点検を自動的に行うことができます。
3.3 水中点検用ロボットシステム
水中点検用ロボットシステムとは,河川やダムなどの水中を点検するロボットです。
図-4のダム堤体点検用の親子型ロボットでは,水上機と水中機をセットで使用し,水上機から水中機をワイヤで降下させて使用します。このことで高精度に位置決めが可能となり,ダム堤体や洪水吐付近などの水中施設を撮影できるようになりました。本システムは,これまでダイバーが行っていた大深度潜水などの危険な作業の代替となることが期待されています。

【図-4 ダム調査用親子ロボット(写真は水上機)※1 キュー・アイ】
また,図-5の河川点検用ロボットでは,航空測量と連携することで,航空撮影では撮影できなかった深い川底の様子や橋の陰などの状況を取得することができます。連携により詳細な河川地図の作成が可能となり災害予防などに役立てることができます。

【図-5 河川点検用フロートロボット※1 朝日航洋】
3.4 災害調査ロボットシステム
災害調査ロボットシステムは,災害現場において,土砂崩落状況や火山災害状況を早期に確認するためのロボットです。マルチコプタにより高精細な画像を取得することや,立体地図の作成が可能です。また土石流の予測のために,上流の土砂を取ってくる装置や,上流の土砂の透水性等の性質を測る装置を作りました。マルチコプタから吊り下げる電磁探査デバイスでは,土中に埋没した車両を発見することができます。昨年の実証実験では,マルチコプタを自動飛行させて3D地理情報を作ることができたため,災害時にすぐにでも適用可能なものとして,注目と期待を集めました。図-6は,土砂採取ロボットを吊り下げたマルチコプタの様子です。

【図-6 サンプリングデバイスを運搬中の災害調査用飛行ロボット※1 国際航業他】
図-7は,地上から災害現場の状況を調査するロボットの外観です。遠隔操作で操縦され,悪路でも走行可能な構造となっています。走行時には前方の映像を伝送し,遠隔操作用の画面としたり周囲状況を調査するほか,土砂をサンプリングしたり,赤外線で遭難者を発見する機能も内蔵しています。

【図-7 災害調査用クローラロボット※1 日立製作所他】
トンネルの事故現場は暗いことに加え,引火性ガスの危険性があります。人に先駆けてロボットが危険な現場に駆けつけることができれば,早い時期に現場状況やガスの有無をチェックでき,救助員が現場に向かうための判断をすることができます。可燃性ガスの存在や現場状況をいち早く知るために,防爆型の移動ロボットを開発しました。この図-8のロボットは遠隔移動ロボットとして世界初の防爆認証を取得しました。

【図-8 引火性ガス雰囲気内探査ロボット※1 三菱重工業】
3.5 災害対応ロボット
雲仙普賢岳の火山噴火以降,砂防工事等で各種の無人化施工の機械装置が開発されています。一方,水害により出水が起こると,水中での作業となります。災害対応のためにさまざまな機材や材料を搬送することが必要となりますが,1.5m程度の水中環境(半水中)において,これらを搬送するロボットはありませんでした。今回開発したロボットは,半水中の環境において運搬可能なロボットであり,他の無人化施工の建設機械と同様に遠隔で操作できるものです。現在開発が進んでいるロボットでは,最新の情報化施工等の技術を取り入れ,オペレータの負荷を軽減するものとなっています。
図-9は,水槽の中を走行する搬送ロボットであり,図-10は操作室の様子です。

【図-9 半水中重運搬ロボット※2 次世代無人化施工技術研究組合】

【図-10 無人化施工の操作の様子※2 次世代無人化施工技術研究組合】
4. おわりに
今回,NEDOで行っている2つのプロジェクトで開発を進めているロボットについて,概要を紹介いたしました。NEDOは,技術開発と併せて実際のフィールドを活用した現場検証や評価に特に重点を置き,現場ニーズを踏まえた改良や実用性に優れた技術の現場への早期導入を目指しています。今後,これらのロボットがインフラ維持管理から,災害調査,災害対応などのさまざまなフィールドで安全かつ迅速に現場で活用されることを期待しています。
参考URL:
● インフラ維持管理・更新等の社会課題対応システム開発プロジェクト
http://www.nedo.go.jp/content/100871665.pdf
● 個別ロボットの紹介ハンドブック
http://www.nedo.go.jp/library/pamphlets/RB_201803_project.html
● ロボットの動画
https://www.youtube.com/playlist?list=PLZH3AKTCrVsXbC-wFJDNMFV7Tlxk1QImd
● SIPインフラ維持管理・更新・マネジメント技術
http://www.jst.go.jp/sip/k07.html#KADAI
※1は2.1のプロジェクトで開発されたロボットです。
※2は2.2のプロジェクトで開発されたロボットです。
【出典】
土木施工単価2018秋号
最終更新日:2018-12-10
同じカテゴリの新着記事
- 2023-05-16
- 土木施工単価
- 2023-05-08
- 土木施工単価
- 2023-05-01
- 土木施工単価
- 2023-03-06
- 土木施工単価
- 2023-03-02
- 土木施工単価
- 2023-02-27
- 土木施工単価
- 2023-01-26
- 土木施工単価
- 2023-01-26
- 土木施工単価
- 2023-01-23
- 土木施工単価
- 2023-01-23
- 土木施工単価