検索

電子カタログ
「マルチビーム一体型深浅測量用無人リモコンボートRC-M1|コデン株式会社」の資料請求はこちらから
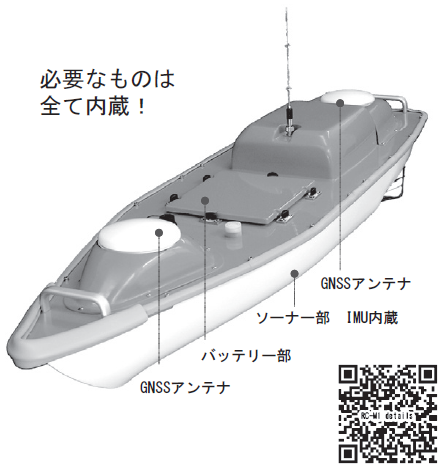
RC-M1は、マルチビームとIMU、GNSSを内蔵し、安全で正確に深浅測量業務が行えるナローマルチビーム搭載型調査用無人リモコンボート。
国土交通省の「i-Construction」対応。
オール一体型で艤装不要の無人リモコンボートで陸上からの1人測量が可能。
2名で入水し10分でマルチビームによる深浅測量を開始できるため、経済性および施工性が向上する。
またソーナー発信器が船底から突出しない設計で、消波ブロック直上などの危険水域での測量が難しかった浅瀬での測量を実現した。
公共工事では深浅測量(浚渫、港湾水路確保、ダム堆砂、河床変動等)にその効果を発揮する。
「マルチビーム一体型深浅測量用無人リモコンボートRC-M1|コデン株式会社」の資料請求はこちらから
最終更新日:2023-07-31