- 2026-06-19
- 土木資材・工法
株式会社奥村組(所在地:大阪市阿倍野区、代表取締役社長:奥村太加典)と、西松建設株式会社(所在地:東京都港区、代表取締役社長:細川雅一)は、シールド工事の掘進管理測量において、既知点へのプリズム据付作業を自動化する測量システム「わんワン測量」を共同開発した。
■概要
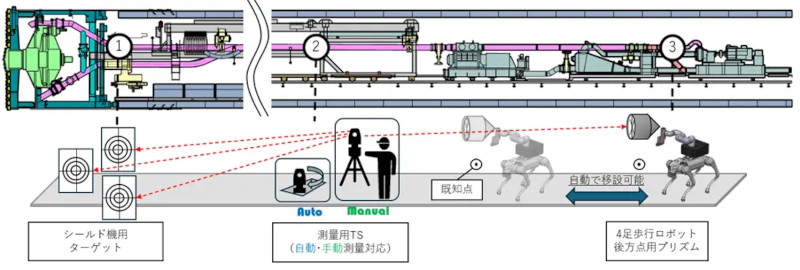
本システムは、シールド工事における掘進管理の坑内測量に4足歩行ロボットとロボットアームを活用して、既知点へのプリズム据付作業を自動化するものである。
測量開始後、ロボットは坑内を自律的に移動し、指定された既知点においてプリズムを自動設置する。
これにより、坑内移動やプリズム据付作業の無人化を実現する。
- 4足歩行ロボットについて
本システムで採用した4足歩行ロボットは、トンネルの線形や軌条設備に依存せず、足場上を柔軟に移動することが可能。
遠隔操作による自動発進、帰還機能を備えており、測量作業の合間に手動でロボットの配置や退避が不要。
ロボット上部に搭載した3D-LiDARセンサーで取得した点群データを活用し、あらかじめ設定した座標点情報を参照することで、既知点までの移動を自動制御する。 - ロボットアームについて
4足歩行ロボットは、既知点に到着後、プリズム据付時の転倒防止と安定性確保のため重心を低くした安定姿勢をとり、ロボットアームを展開する。
その後、ロボットアームの先端に搭載したカメラで撮影した画像を基に、AIによりロボットアームを最適に調整することで、既知点の鉛直上にプリズムを据え付ける。 - 自動充電ステーション(犬小屋)について
4足歩行ロボットは、測量開始(システム起動)時に後方台車に設置した自動充電ステーション(接触型充電方式)から自動発進し、測量終了後に自動帰還して充電を行う。
なお、ステーション付近にロボットが乗り越えるには困難となる段差がある場合は、スロープの設置が必要となる。
■問い合わせ先
株式会社奥村組
https://www.okumuragumi.co.jp/
最終更新日:2026-06-19
同じカテゴリーの新着記事
- 2026-06-19
- 土木資材・工法
- 2026-06-09
- 土木資材・工法
- 2026-05-27
- 土木資材・工法
- 2026-05-26
- 土木資材・工法
- 2026-05-19
- 土木資材・工法
- 2026-05-15
- 土木資材・工法
- 2026-04-23
- 土木資材・工法
- 2026-04-01
- 土木資材・工法