準天頂衛星システムを活用したロータリ除雪車自動化の開発
1. はじめに
高速道路における除雪等の雪氷作業は、24時間365日の道路交通確保のため視界不良や夜間等の厳しい作業環境の下、熟練オペレーターによる高度な技術と経験により行われている。
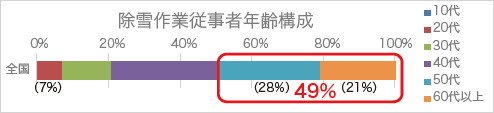
一方で、熟練オペレーターの高齢化や労働人口の減少により、技術伝承が困難な状況になりつつある。
そこで、非熟練オペレーターでも安全・確実に作業ができる環境を構築し、また乗員を2名から1名にするなど除雪作業の省力化・効率化を目的に、ロータリ除雪車の自動化技術の開発を行ってきた。
本稿では、ロータリ除雪車自動化に向けて進めてきた開発の取組みを紹介する。
2. 開発概要
準天頂衛星システム「みちびき」からのcm級測位補強信号とあらかじめ作成した高精度地図情報を組み合わせ、運転席に設置したモニターに正確な自車位置を表示し、運転操作を視聴覚的に支援するシステム(以下、運転支援システム)を開発した。
そして、運転支援システムから位置情報・測位情報を受け取り、ロータリ除雪車が自動で走行(以下、自律走行)し、除雪装置が自動で制御(以下、自動除雪)される仕組みである。
イメージ図を図- 1、2に示す。
なお、除雪車は一般の乗用車や商業トラック等と異なり特殊車両であり、単に自動車メーカーが開発したシステムを購入すれば自動化が実現できるものではないため、弊社と車両メーカーで連携して開発を進めた。
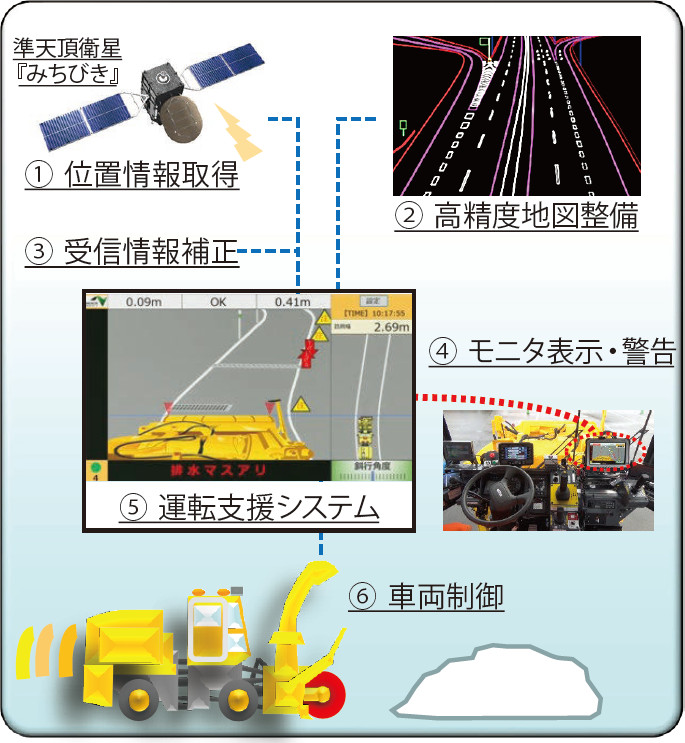
図-1 ロータリ除雪車自動化の概要
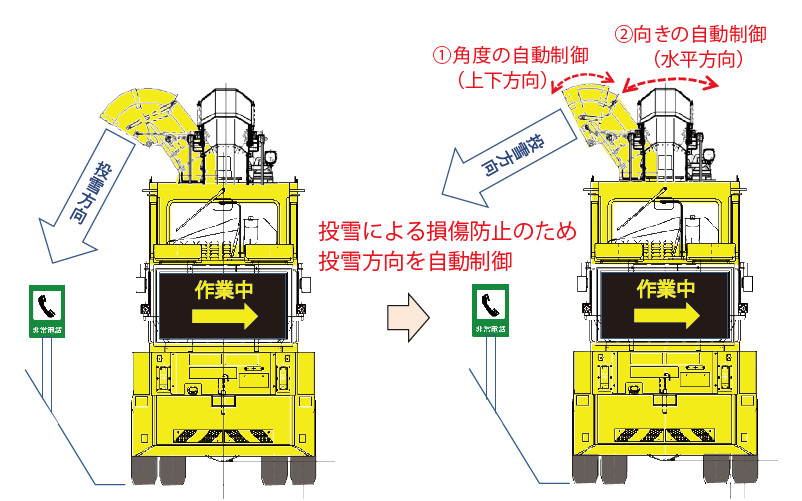
図-2 除雪装置操作の自動化イメージ
3. 運転支援システムの開発
開発は運転支援システムを先行して行った。
このシステムにより、積雪でレーンマークが見えない状況や吹雪による視界不良等過酷な条件下でも、走行車線へのはみ出しやガードレール等への接触を回避し、複雑な運転作業を要する除雪作業に有効であることが確認された。
システムの主な開発内容は以下のとおりである。
3-1 高精度測位方法選定
視界不良や堆雪している条件下での運用が前提のため、一般的なカメラやミリ波レーダーの利用は困難と判断し、衛星測位システムにより位置情報を取得する方法を選択した。
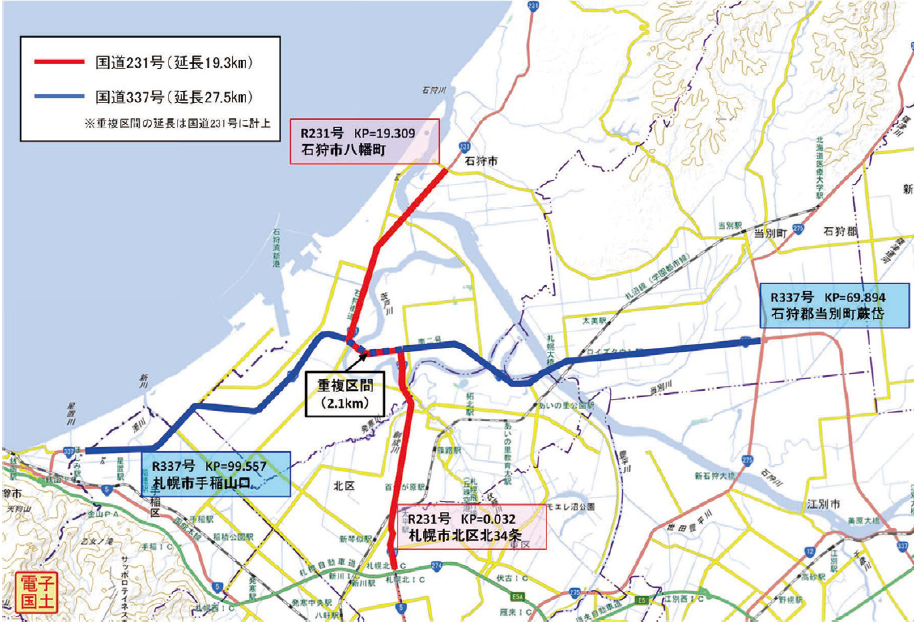
準天頂衛星の信号は、これまでのGPS信号の受信が不安定であった山間部でも安定して受信が可能であり(図- 3)、準天頂衛星システム「みちびき」のcm級測位補強信号に対応し高精度測位が可能な受信機(以下、受信機)を用いることで、道路上の車両等の位置を正確かつ安定して把握できる有効な手段である。
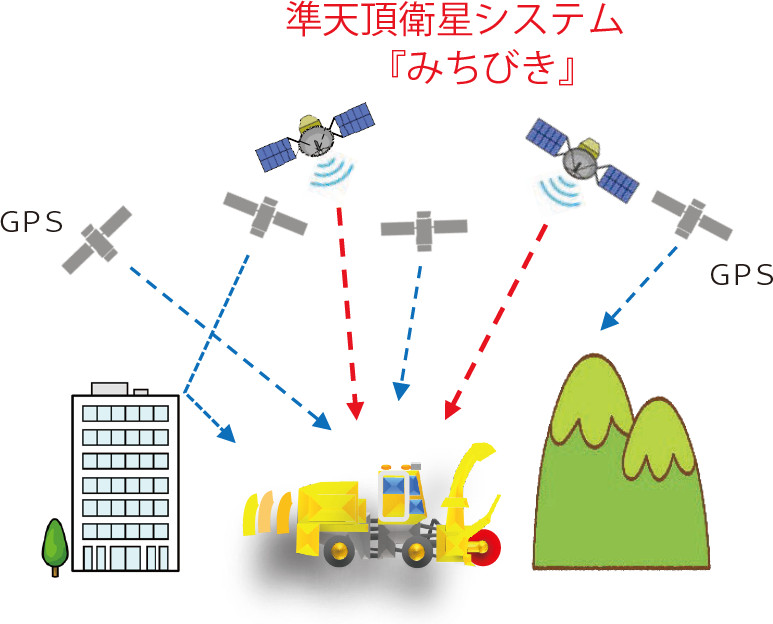
図-3 受信イメージ
3-2 高精度3次元地図の整備
正確な位置情報検出には高精度な地図情報が必要なことから、路肩外側線や縁石等の道路地物の3次元位置情報を測量にて取得した。
取得した位置情報から縦断方向に1mごとの高精度3次元地図を作成し、運転支援システムに登録した
(図- 4)。

図-4 高精度3次元地図の取得地物情報
3-3 受信情報の補正
受信機で得られる測位情報は“受信した時点”における“アンテナ位置”の情報であり、地殻変動への対応が必要なことや、路面傾斜がアンテナに与える影響も考慮する必要があることから、運転支援システムを高精度に運用するために以下の補正を行った。
a)地殻変動補正
地殻の経年誤差を解消するため、国土地理院で公表されている地殻変動補正パラメータファイルITRF2014(4回/ 更新)を用いて、受信時点(今期)の位置から地図の元期(1997.1.1)の位置へ変換し、地図との誤差を最小限とした(図- 5)。
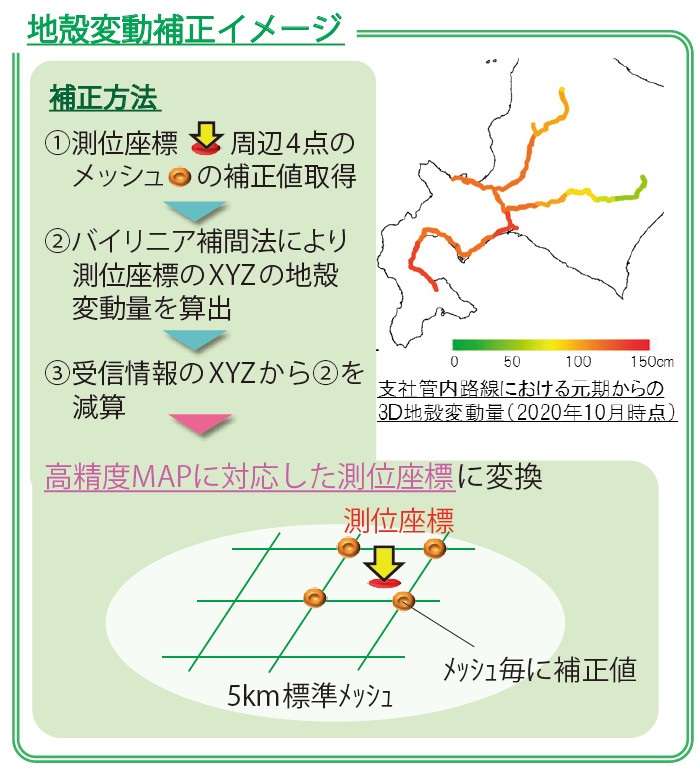
図-5 地殻変動補正のイメージ
b)傾斜補正
車体の傾斜によるズレをIMU(ジャイロセンサーと加速度センサーを用いて進行方向や姿勢を検知する機器)により傾き角度を取得して、アンテナ位置取得座標に対し3次元座標の回転計算を行い、路面位置座標に変換することで地図に対し正確な自車位置を反映させた(図- 6)。
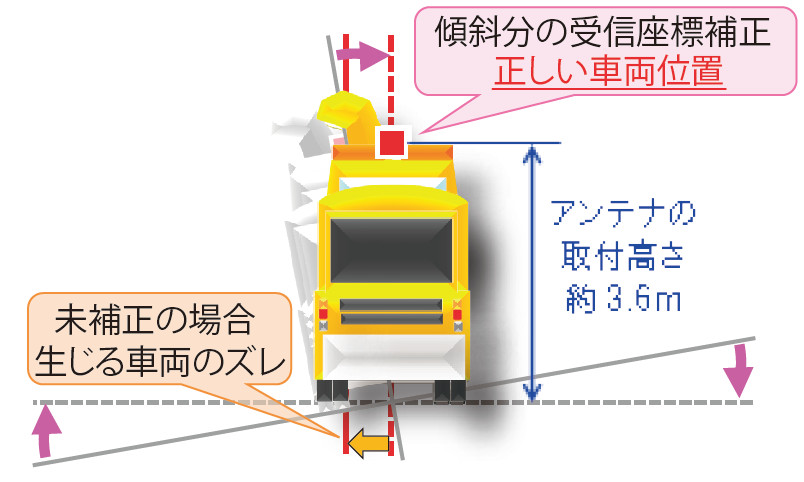
図-6 傾斜補正のイメージ
3-4 進行方向の把握
当初、運転支援システムではアンテナ1基での運用を想定し、受信機の走行軌跡をつなげて進行方向を決定する方法を採用していた。
しかし、ロール方向に(車体の前後の軸に対して回転するように)揺れると方向が狂ってしまうことがあるため、アンテナを2基使用しそれぞれの位置情報から進行方向を求める仕組みに変更した。

写真-1 アンテナの設置状況
4. 自律走行および自動除雪の開発
運転支援システムが平成29年度に完成し、続いて令和元年度には除雪車の車両メーカー2社とそれぞれ共同研究開発協定を締結し、ロータリ除雪車の自律走行および自動除雪に関する開発に着手した。
令和2年度秋季に夕張インターチェンジ(IC)構内にあるテストコース(以下、夕張TC)にて自律走行が確認でき、翌令和3年度春季に高速道路本線(以下、本線)でも自律走行に成功した。
結果を受け追加改良を実施の上、令和3年度秋~冬季および令和4年度冬季に本線での自律走行と自動除雪の試験を実施した。
令和3年度秋季には、除雪負荷をかけない状態で本線にて自律走行および自動運転の試験を実施した。
自律走行については、開発目標精度として走行時の車両の横断方向の誤差が外側線幅である20cmと設定したが、一部の区間で精度の低下が見られたものの目標精度に収まっていることを確認できた。
自動除雪については、仮想の地物(標識や橋梁のジョイントなど、除雪作業をする際に支障となる構造物の総称)に対し、自動で投雪回避する様子が確認できた。
また、自律走行と自動除雪のいずれにおいてもオペレーターの介入なく正常に動作していることを確認できた(写真- 2)。
一方、跨道橋下等の衛星受信が不安定な環境下では精度低下が課題として抽出され、衛星受信の不安定環境下における精度の向上を検討することとした。
令和3年度冬季には、雪氷期に除雪負荷のかかった状態での試験を、本線にて実施する除雪作業に合わせて行った(写真- 3)。
なお、一般車が走行中の本線において車線規制をせずに試験を行うため、事前に夕張TCで除雪負荷をかけた状態での確認試験を実施し、除雪負荷がかかった状態においても精度に問題はなく、安全に本線試験が実施可能であることを確認した。
自律走行については、除雪負荷のかかった状態で概ね10㎝以内の誤差に収まり、開発目標精度を確保できていることが確認された。
一方で、跨道橋下では秋季試験同様の精度低下や、オペレーターからは自律走行可能な速度の見直し意見があった。
自動除雪については、除雪負荷のかかる実作業時は雪質や積雪量に対して投雪方向など調整可能にする必要があることが確認された。
以上の試験で得られた課題に対し、それぞれ改良を行った。
跨道橋下での精度を向上すべく、ソフトウエア上の自車位置把握ロジックを見直した。
自律走行可能な速度は、従来の時速3 ~ 5kmから時速10kmまで対応可能とした。
さらに、実作業時における雪質や積雪量に対して、自動除雪のパターンを変更可能とした。
令和4年度冬季に改めて本線試験を行い、令和3年度冬季と同様に、除雪負荷のかかった状態における、自律走行の確認および自動除雪の稼働確認を実施した。
令和3年度の試験による課題に対する改善、および当初の目標も満たすことが確認された。
この結果をもって、ロータリ除雪車における自律走行および自動除雪の技術の完成となった。

写真-2 試験中のオペレーター

写真-3 令和3年度冬季本線試験の様子
5. おわりに
ロータリ除雪車の自動化技術の完成に伴い、過年度の試験で使用していた車両2台を令和5年度冬季より道央自動車道 岩見沢IC ~美唄IC間に導入して運用を開始した。
2名乗車にて運用し、 12月から翌3月までに計20回自動で走行した(写真- 4)。
今後、令和5年度冬季の運用結果を検証し、対応の必要なものについて次季の運用に向けてフォローアップしていく。

写真-4 令和5年度冬季の運用時の様子
【出典】
最終更新日:2024-06-20